This project is a portable antenna rotator that can automatically point to an orbital satellite and keep target pointing to it.
Project Statement
The project statement is to provide an antenna rotator system that
- shall be useable for typical cubesat orbits
- shall be used by a Raspberry Pi and other PCs with Windows and Linux
- shall be below a 100 Euros budget to be built
- shall be easy to deploy and to be used
Rotators
The current rotator hardware, the Behemoth, is meant to be used for the 70cm-band (or 435 MHz), but further versions are planned.
- Atlas: Rotator for Antennas < 0.5 Kg
- Behemoth: Rotator for Antennas < 1.0 Kg (current Version)
- Ceres: Rotator for Antennas > 1.0 Kg
We invite you to work on one of the above rotators or design a new one together with us! Discuss it with all of us in our Zulipchat.
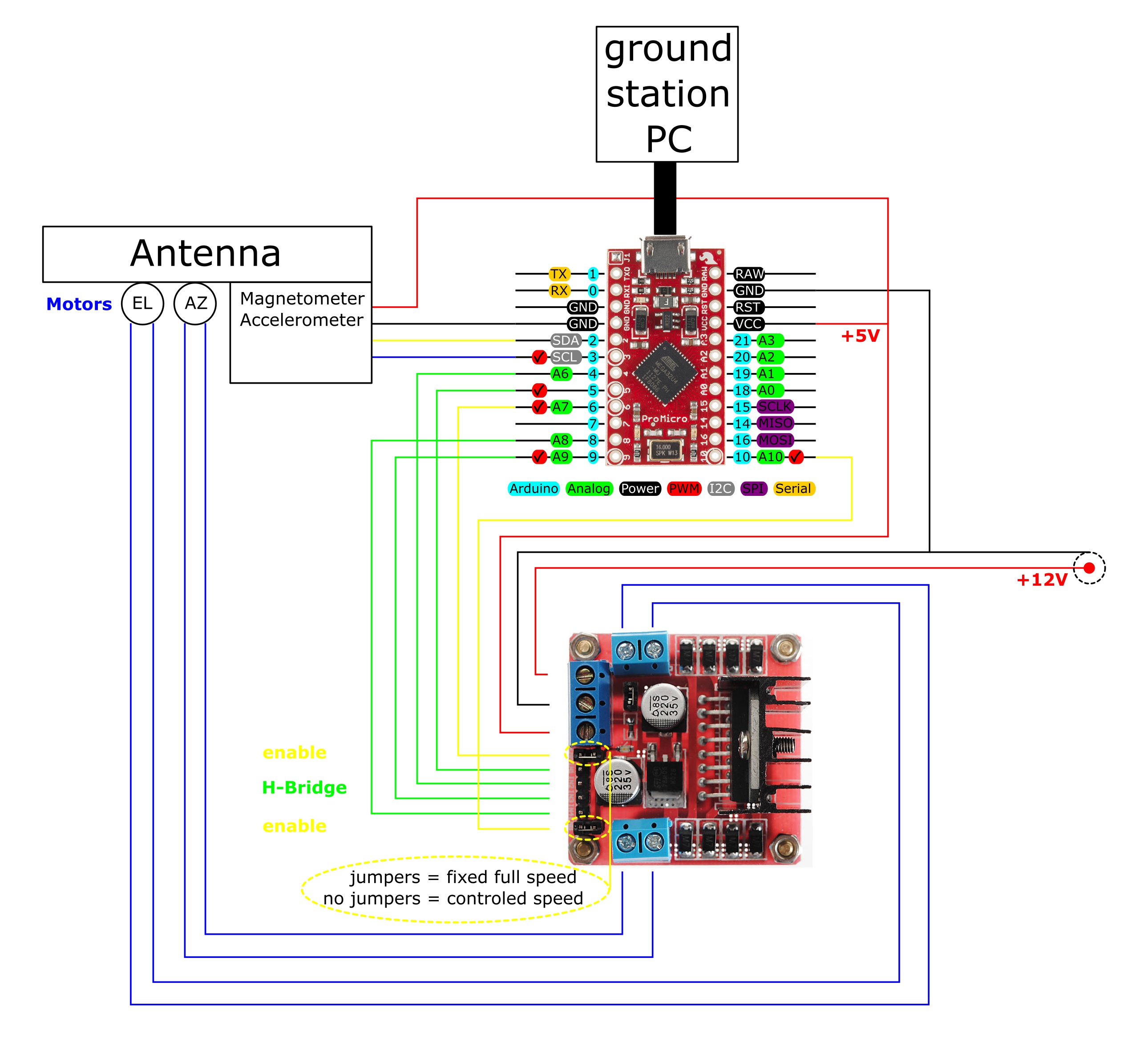
Rotator Behemoth
The Behemoth can be build by these parts…
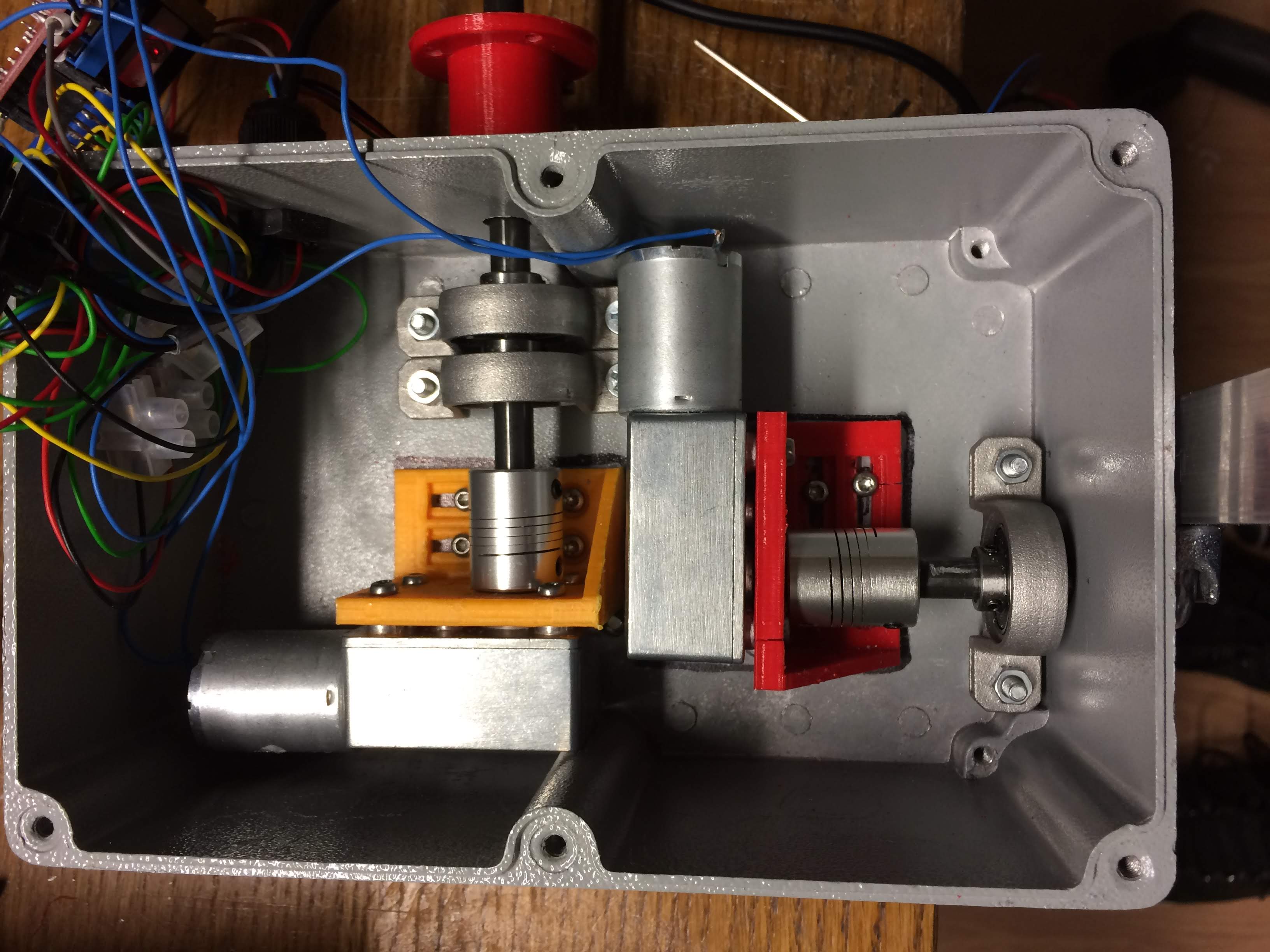
- Controler (1x): Arduino Pro Micro
- DC Motor (2x): DC 12V 0.6RPM High Torque Turbo Worm Geared Motor 370 Right Angle Low Speed
- DC Driver (1x): L298N motor driver board module
- Sensor (1x): LSM303DLHC e-Compass 3-Axis Magnetometer and 3-Axis Accelerometer Module
- Bearing Bracket (2x): for 8mm shaft
- Box: 188x120x78mm Industry Box IP66
- Motor Bracket (2x): Wormgear DC Motor Bracket [3D printed]
- USB Cable (1x)
- Flange Coupler (2x)
- Power Supply 12V DC (1x): Sunix Netadapter for LED 12V DC, AC 100-240V Transformators, 60W Maximal Power Supply 12V 5A
- Others: some screews, cables
Most parts you can get worldwide via Aliexpress. Some parts can be 3D-printed. If you don’t have your own 3D-printer, you can find a makerspace, hackerspace, fablab or similar near you. These spaces are almost everyhwere, just check on hackerspace.org.
Rotator Firmware
The controler software you can find on our Github. Feel free to use it, modify it and also submit us pull-requests.
The rotator firmware is for the Arduino Pro Micro. You will need the Ardunio IDE, and with it you will need to download the Adafruit Library for the LSM303 Sensor.
Commanding the Rotator
You can either control the rotator with your Arduino IDE „Serial Monitor“ or with a Python Script and PySerial.
The commands are based on those for RotCTL (HamLIB). Some commands are modifed to be able to transmit for example angular speeds that RotCTL cannot do. These are for future use.
The most basic commands are:
- set_pos AZIMUTH ELEVATION
- get_pos
- parking
- stop
During the next couple of days, we will update this page, so come back and also participate in building this and more rotators. You can find us on Zulipchat…