Hi there!
My name is Shoumik Dey. I am currently a second year student at Manipal Institute of Technology, India. I preserve strong interest in aviation, aeromodelling and maybe this is the reason that I have chosen to work on this project, this summer, for Google Summer of Code 2019.
You can also find me here:
- https://twitter.com/shoumik_dey
- https://github.com/shoumikdey
- shoumik.dey@aerospaceresearch.net
This is the first blog post for this project. This post will describe the work done so far, the current outcomes, hurdles faced and also they were/can be be solved.
Introduction
‚ADS-B‘ stands for Automatic Dependent Surveillance–Broadcast. The aircraft automatically brodcasts each frame on the 1090MHz frequency periodically which contains navigational data, such as, location, altitude, airspeed etc.
All ADS-B frames do not contain location information in them, therefore the ultimate goal of this project can be described in two parts:
- Self-syncronisation of the ground stations in focus without an external agent.
- Determining the location of the aircraft when location data is not received using multi-lateral positioning
Self-synchronisation
The current and widely used method of synchronising the clock of any ground based station is by using GNSS(Global Navigation Satellite System)-receiver interrogation. The local clocks gets aligned with the atomic clocks in the satellite.
But in this case, the synchronisation takes place by calculating the actual point of time when an aircraft broadcasts a message. This serves as the reference time at all ground stations, and since this time value is same all over, hence all the stations become self-synchronised.
Data required for self synchronisation:
- Time of arrival of the message at the ground station
- Time difference of arrival at that station.
Calculating the time difference of arrival(TDOA):
- The receiver provides the time at which the frame(with location) is received.
- The time of travel of the frame is calculated by using simple math and that is subtracted from the time of arrival.
sqrt((x2-x1)^2 + (y2 - y1)^2 + (z2 - z1)^2)where x1, y1, z1: Latitude, longitude and altitude of ground station; x2, y2, z2: Latitude, longitude and altitude reported by aircraft.
Data that we have for self-synchronisation:
We have decided on using dump1090 for generating the ADS-B messages from the IQ stream as recorded by the SDR radio. Dump1090 provides the mlat(multilateration) data in avr format. The first 6 bytes of the message provides the sample position of the last bit of that message.
Example:
Raw: @0000000929E28e3ff6e6990c4684000011548194;
Sample Position: 0000000929E2
Message: 8e3ff6e6990c4684000011548194
Next, we shift the sample position record from the last bit of the message to the first bit.
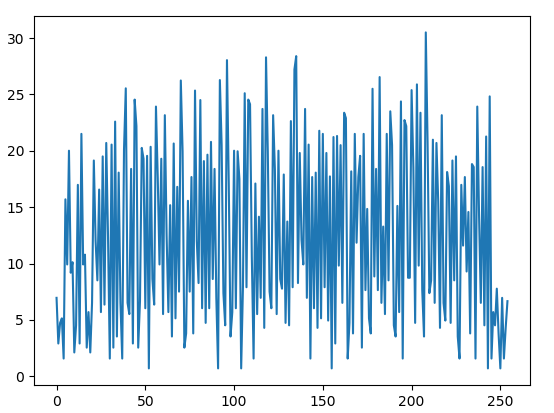
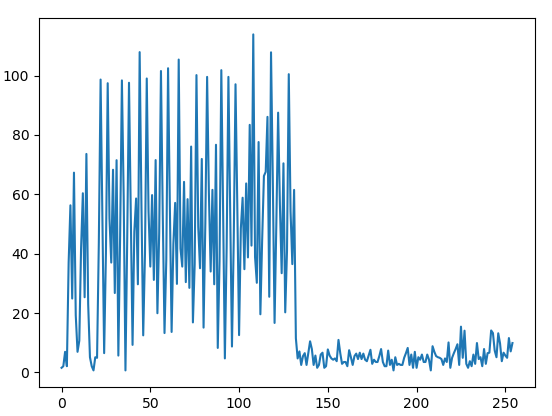
As we can see, the length of the messages is exactly half of each other.
The sample position reported by dump1090 is exactly 240 samples ahead of the preamble (You can see the preamble at the beginning, by 4 spikes in the signal).
So, the sample position is taken back by 240 samples for both the cases to reach the beginning of the preamble.
Now, data in hand:
- Start time of the stream
- Sample position of the beginning of the message in the stream.
Therefore the time of arrival(TOA) can thus be calcualted.
Work done so far
- A plugin to import the mlat output of dump1090 (ADS-B raw) has been created, which imports the message and the sample position into the main program
- The raw data is reorganised in our suitable format and terms.
- With each frame present;( for 112 bit frames as of now)
- Determination of the type of frame and it’s content
- Decoding those data present in that frame
- Output dump file which contains the frame and the data contained in it. (Only extraction, no calcualation)
Next up….
The next blog post will contain the implementation of the calculation layer of the project. In this layer, the data in the frames will be processed and information such as position, velocity, altitude will be covered.
The post will also contain the unusual findings and irregularities that were found in the stream and how we have decided to deal with it.